
Greta Brown
M.S. in Computer Science Student, University of Minnesota - Twin Cities
brow6802@umn.edu
Bio
I am an M.S. in Computer Science student at the University of Minnesota, Twin Cities with a research focus on field robotics and multi-agent systems. I am advised by Maria Gini and conduct research in the Next Generation Robotics Laboratory. I am currently a planetary sampling automation intern at NASA Ames Research Center. I have worked as a teaching assistant for courses in Python, Java, algorithms and data structures, and artificial intelligence. I received my Bachelor of Science in Computer Science from the University of Minnesota, Twin Cities in 2025.
Publications
Most recent publications on Google Scholar.
Model-Free Subsurface Anomaly Detection using Subspace Analysis Techniques for Sparse Telemetry for Extraterrestrial Drilling Robots
S. Boelter, G. Brown, E. Temesgen, L. Weber, T. Stucky, B. Glass, M. Gini
IEEE International Conference on Robotics and Automation (ICRA), 2026.
Diagnostics for Drilling Fault Prediction in Planetary Drills
S. Boelter, G. Brown, T. Stucky, E. Forberger, G. Wilson, M. Gini, B. Glass
9th International Symposium on Ice Drilling Technology, 2025.
A Concept for Planetary Drilling Autonomy
S. Boelter, E. Temesgen, G. Brown, M. Jerez, E. Forberger, B. Glass, M. Gini
ICRA Workshop on Field Robotics, 2025
Geofenced Unmanned Aerial Robotic Defender for Deer Detection and Deterrence (GUARD)
E. Temesgen, M. Jerez, G. Brown, G. Wilson, S. Divakarla, S. Boelter, O. Nelson, R. McPherson, M. Gini
ICRA Workshop on Novel Approaches for Precision Agriculture and Forestry with Autonomous Robots, 2025.
Abstracts
Autonomous Fault and Anomaly Detection in Extraterrestrial Drilling
G. Brown, S. Boelter, R. Mai, T. Stucky, M. Gini, B. Glass
23rd International Planetary Probe Workshop (IPPW), 2026.
Projects

Experience
My full resume is here
Farm Robotics Challenge | 2024-2026
Developed FarmGuard,
an award-winning
autonomous drone system to detect and deter deer in agricultural fields.
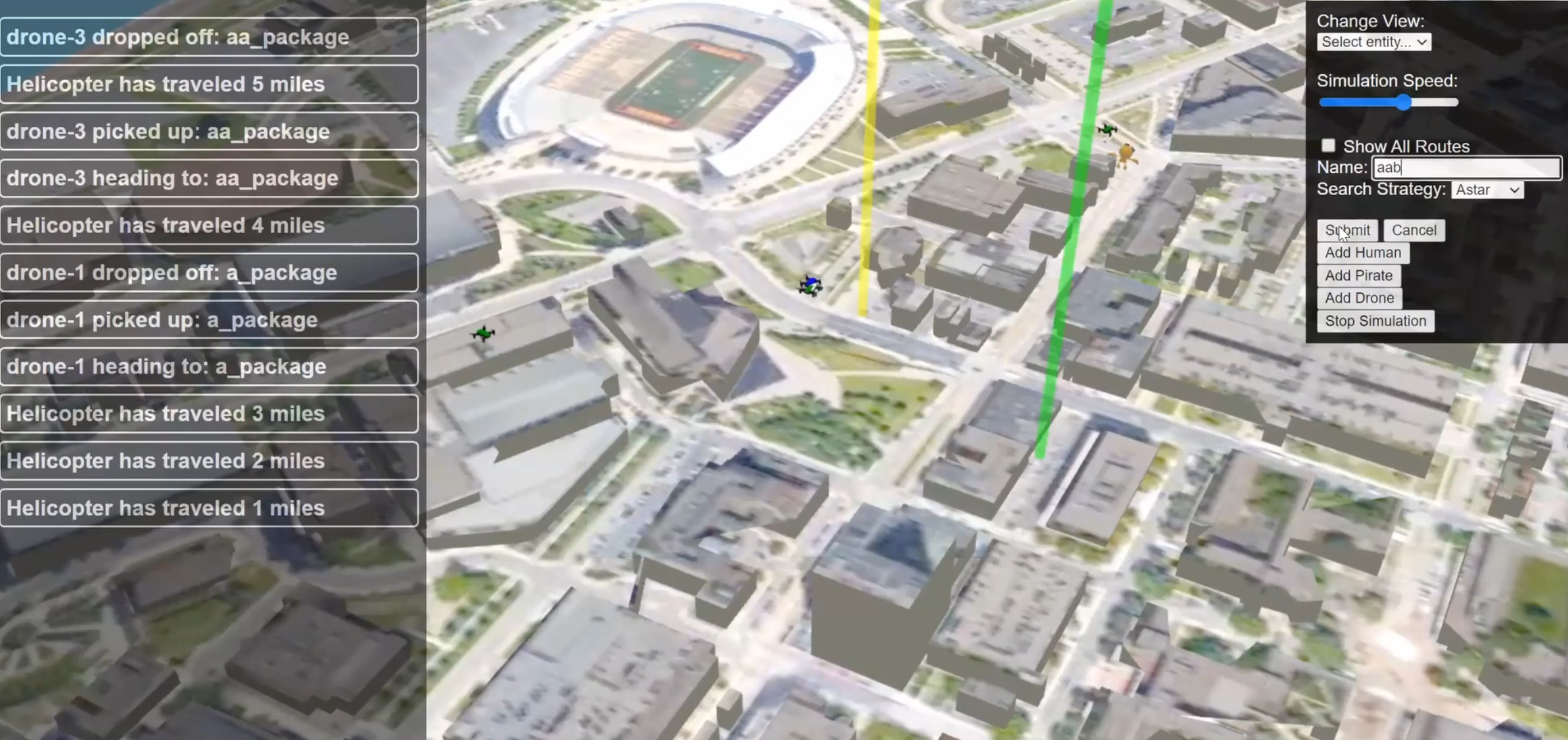
Along with contributing to drone behavior, path planning, and hardware/software integration, I led the efforts in creating the
videos for our final project submission. This included writing, recording, and editing the following:
UMN FRC Video 2025
UMN FRC Video 2026
Additional informational video on our project: UMN student-led team uses drones to deter deer from crops
Awards
CRA Outstanding Undergraduate Researcher Award | Honorable Mention | 2025-2026
Research in autonomous planetary robotics, focusing on field-deployable drill perception and planning.
Article
Undergraduate Research Opportunities Program (UROP) Award | August 2024 - December 2024
Researched multi-agent real robot systems using reinforcement learning; developed a novel
hardware-software integration method for the most current platforms available.
Abstract and Presentation